Outstanding Performance
Arbe’s robust processing technology and advanced algorithms enable ultra high resolution, delivering unparalleled radar performance by leveraging thousands of virtual transmitting and receiving channels.
1° Azimuth
1.7° Elevation
Ultra high resolution
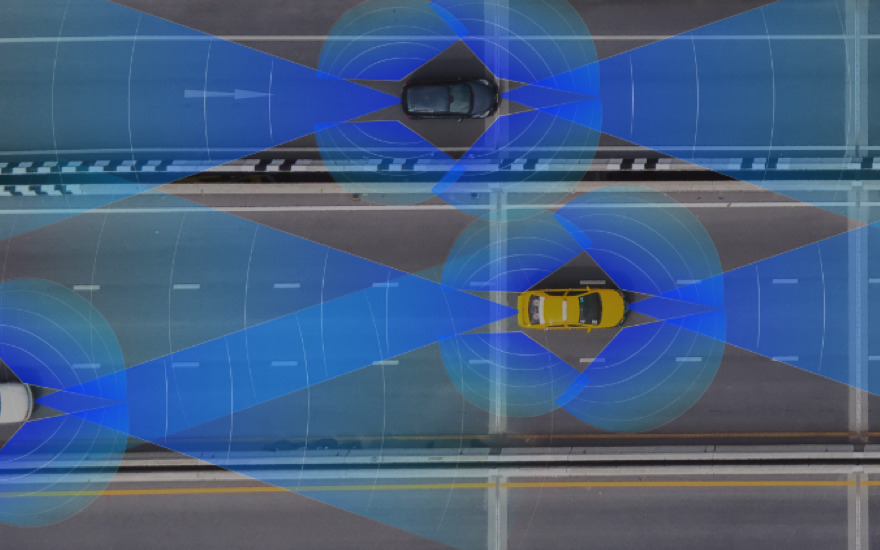
100° Azimuth
30° Elevation
Wide field of view
300m
Long range
30 FPS
Real time
7.5cm-60cm
High range resolution
0.1 m/s
Doppler resolution
~0
False alarms
100s
Objects identified